Програмний маршрутизатор “Сіріус-К”
(надалі – Маршрутизатор) призначений для автоматичної побудови оптимальних маршрутів і профілів польоту (надалі – маршрутів) безпілотних літальних апаратів, які наводяться за координатами точок прицілювання та не повертаються на базу (надалі – БпЛА або камікадзе). Він дозволяє скоротити час на планування польотів таких БпЛА, зменшити помилки, пов’язані з людським фактором, та збільшити кількості факторів, які повинні враховуватися при побудові маршрутів, за рахунок автоматизації цього процесу.
КРИТЕРІЇ ПОБУДОВИ
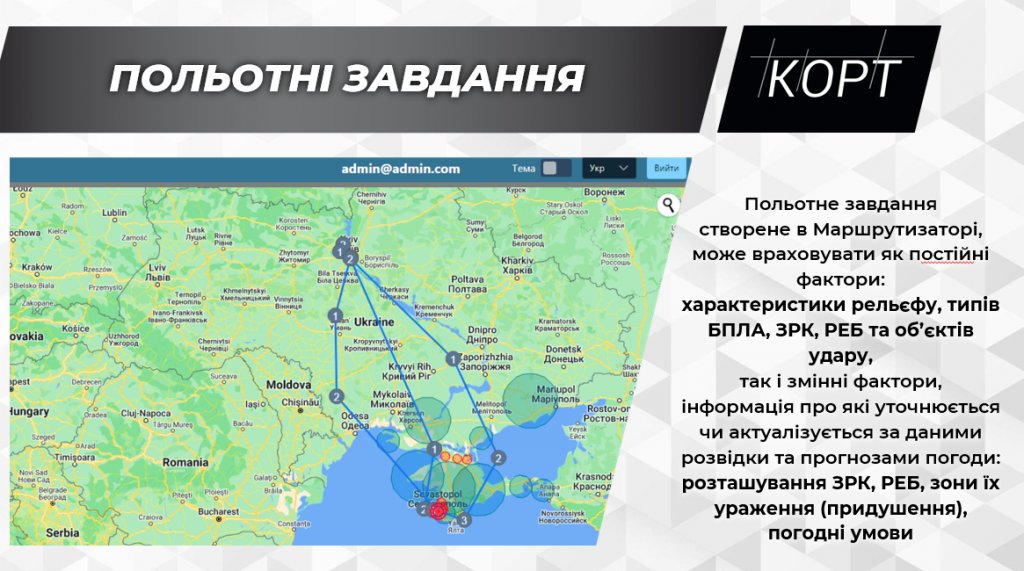
Маршрути, які будуються за допомогою Маршрутизатору, дозволяють мінімізувати ризики втрати БпЛА від розвіданих
зенітних засобів (ЗРК) і наземних засобів радіоелектронної боротьби (РЕБ), а також зменшити ризики ушкодження цивільних та своїх військових об’єктів під час застосування таких БпЛА за рахунок обминання заборонених для польоту зон (у тому числи обраних населених пунктів).
СКЛАД МАРШРУТИЗАТОРУ
Хмарний сервер, на якому при наявності доступу до інтернету здійснюються побудова маршрутів.
Локальний сервер (опційно), який використовується для побудови маршрутів при відсутності доступу до інтернету на основі інформації, отриманої від хмарного серверу в ході останнього сеансу зв’язку з ним.
Бортовий мікрокомп’ютер, призначений для забезпечення можливості побудови маршрутів на хмарному та/або локальному серверах з використанням штатного пульта керування безпілотних авіаційних комплексів (БпАК), зберігання на борту БпЛА знайдених маршрутних точок, порційного їх завантаження в пам’ять штатних автопілотів БпЛА та для затирання усіх маршрутних точок, що зберігаються в його пам’яті та в пам’яті штатного автопілоту (у випадку падіння БпЛА та відсутності детонації корисного навантаження).
СТРУКТУРНА СХЕМА МАРШРУТИЗАТОРА